| 睡觉时间 | 12:25 |
|---|---|
| 起床时间 | 7:49 |
| 健身 | √ |
记录
这种不带大脑的聊天真的好舒服呀,有点看短剧的感觉了。  被璇宝小小地嘲讽了一下,可爱捏,以后中午直接麻辣烫,节约经济。
被璇宝小小地嘲讽了一下,可爱捏,以后中午直接麻辣烫,节约经济。 
期权
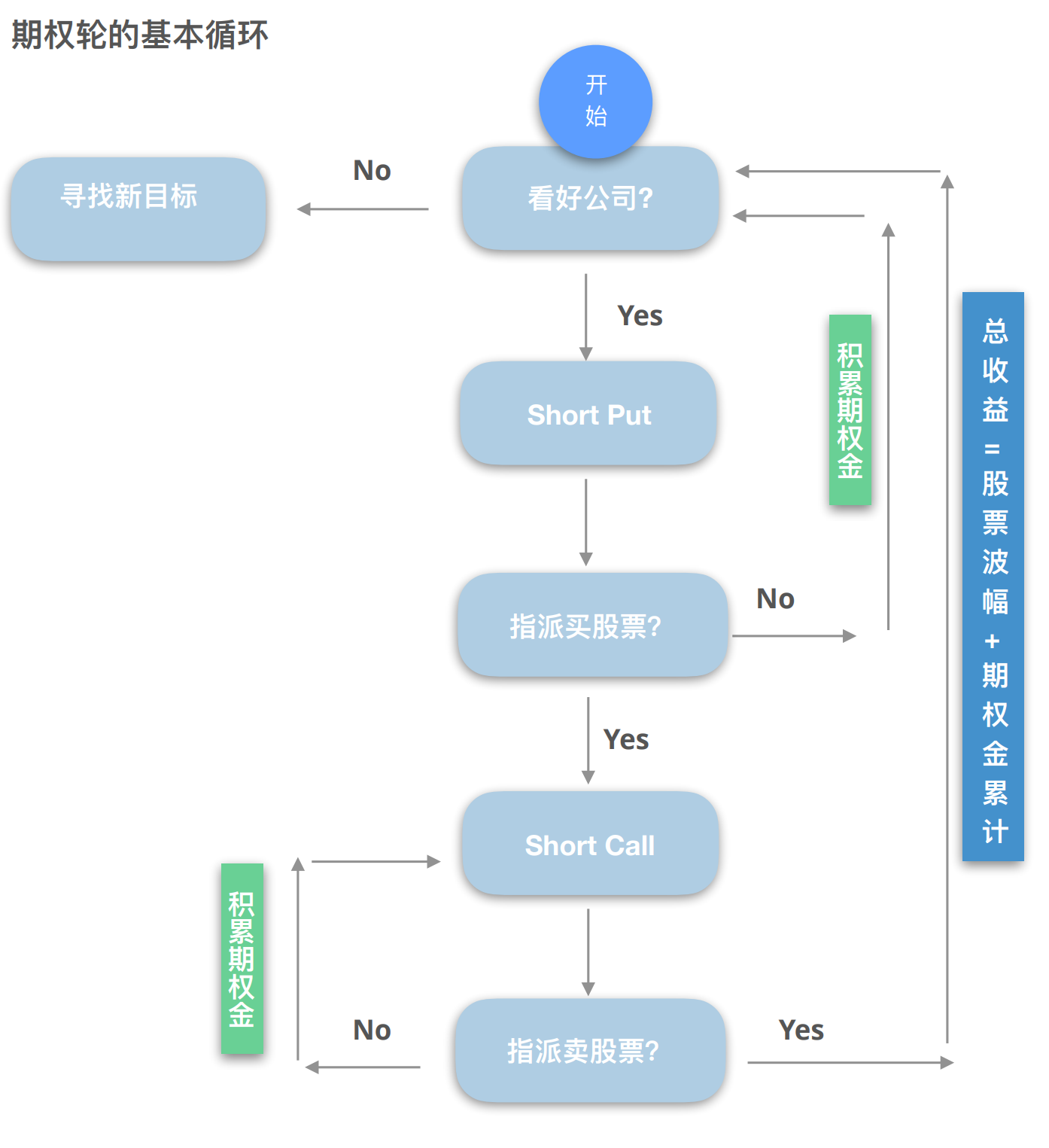
早上看到OTM的时候突然忘了这三个字组在一起啥意思了,下图解释了 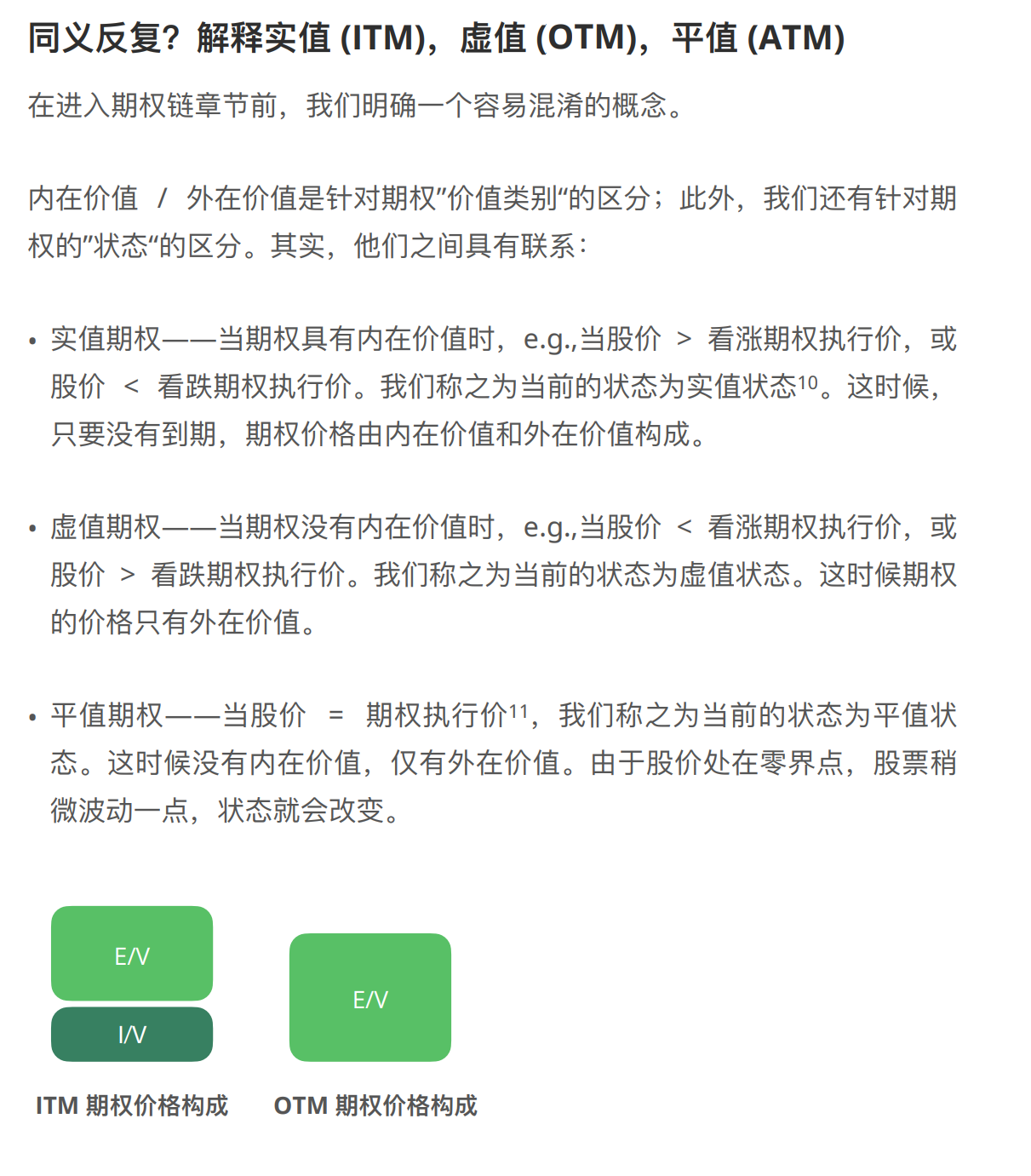 手上没有股票的时候,可以不用直接买股票,而是卖给别人看跌合约,期权金为2元。假设股票没有跌破执行价100元,那么这个期权金就是白赚的。假设跌破了执行价,比如跌到98元,那么你就需要花100元执行价去买98元的股票,但是期权金赚了2块,所以相当于不赚不亏,期权金可以帮你缓冲,可以的昂,怎么感觉这么搞很赚呢。
手上没有股票的时候,可以不用直接买股票,而是卖给别人看跌合约,期权金为2元。假设股票没有跌破执行价100元,那么这个期权金就是白赚的。假设跌破了执行价,比如跌到98元,那么你就需要花100元执行价去买98元的股票,但是期权金赚了2块,所以相当于不赚不亏,期权金可以帮你缓冲,可以的昂,怎么感觉这么搞很赚呢。
假设刚才股票跌破了执行价,你买了100股刚刚大跌的股票,那么你可以 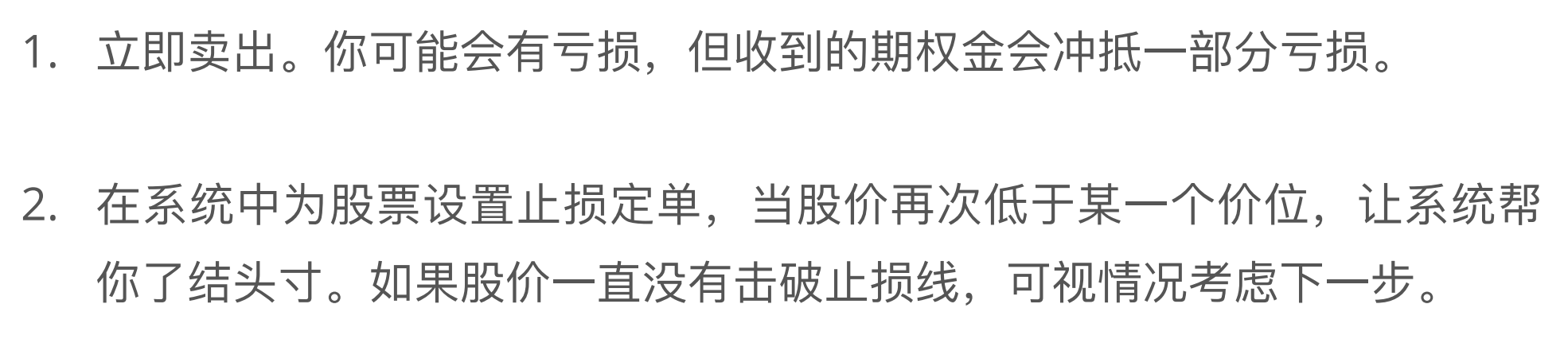 假设你发现这个股票后面没有跌的很厉害,那么可以再操作一次,卖出看涨期权来赚取期权金。
假设你发现这个股票后面没有跌的很厉害,那么可以再操作一次,卖出看涨期权来赚取期权金。
UE broad phase
/** Used for updating intermediate spatial structures when they are finished */
struct FPendingSpatialData
{
FAccelerationStructureHandle AccelerationHandle;
FSpatialAccelerationIdx SpatialIdx;
int32 SyncTimestamp; //indicates the inputs timestamp associated with latest change. Only relevant for external queue
EPendingSpatialDataOperation Operation;
}
struct FPendingSpatialDataQueue
{
TArray<FPendingSpatialData> PendingData;
TArrayAsMap<FUniqueIdx,int32> ParticleToPendingData;
}
/** Pending operations for the internal acceleration structure */
FPendingSpatialDataQueue InternalAccelerationQueue;
/** Pending operations for the acceleration structures being rebuilt asynchronously */
FPendingSpatialDataQueue AsyncAccelerationQueue;
/*在函数FlushAsyncAccelerationQueue()中,有下面的函数,它会将每个刚体的包围盒构建一个场景的bvh */
const bool bExisted = AccelerationStructure.UpdateElementIn(UpdateParticle, UpdateParticle->WorldSpaceInflatedBounds(), UpdateParticle->HasBounds(), SpatialData.SpatialIdx);从下面的叶子节点代码可以看出这是个二叉树
struct TAABBTreeNode
{
TAABB<T, 3> ChildrenBounds[2];
int32 ChildrenNodes[2];
int32 ParentNode;
bool bLeaf : 1; //定义该节点是不是叶子节点
bool bDirtyNode : 1;
}AABBTree.cpp中
//设置叶子节点中最大的刚体数量
int32 FAABBTreeCVars::DynamicTreeLeafCapacity = 8;
FAutoConsoleVariableRef FAABBTreeCVars::CVarDynamicTreeLeafCapacity(TEXT("p.aabbtree.DynamicTreeLeafCapacity"), FAABBTreeCVars::DynamicTreeLeafCapacity, TEXT("Dynamic Tree Leaf Capacity"));
//包围盒padding
float FAABBTreeCVars::DynamicTreeBoundingBoxPadding = 5.0f;
FAutoConsoleVariableRef FAABBTreeCVars::CVarDynamicTreeBoundingBoxPadding(TEXT("p.aabbtree.DynamicTreeBoundingBoxPadding"), FAABBTreeCVars::DynamicTreeBoundingBoxPadding, TEXT("Additional padding added to bounding boxes for dynamic AABB trees to amortize update cost"));
//这个是静态树的叶子节点的最大刚体数,只在初始化的generate tree 中用到
FAutoConsoleVariableRef CVarMaxChildrenInLeaf(TEXT("p.MaxChildrenInLeaf"), BroadPhaseConfig.MaxChildrenInLeaf, TEXT(""));看了下给树插入新的节点的过程,但是我很好奇这么一个一个插入这对吗,难道不是应该一开始获取所有的aabb,然后根据最大的那个盒子分成两个小盒子,然后依次递归吗,为啥会有一个一个加入的过程。
CreateEmptyCollection()函数介绍了初始化树的过程,会初始化两个树,一个树是静态的,一个树是动态的,这里树还没有建立出来。 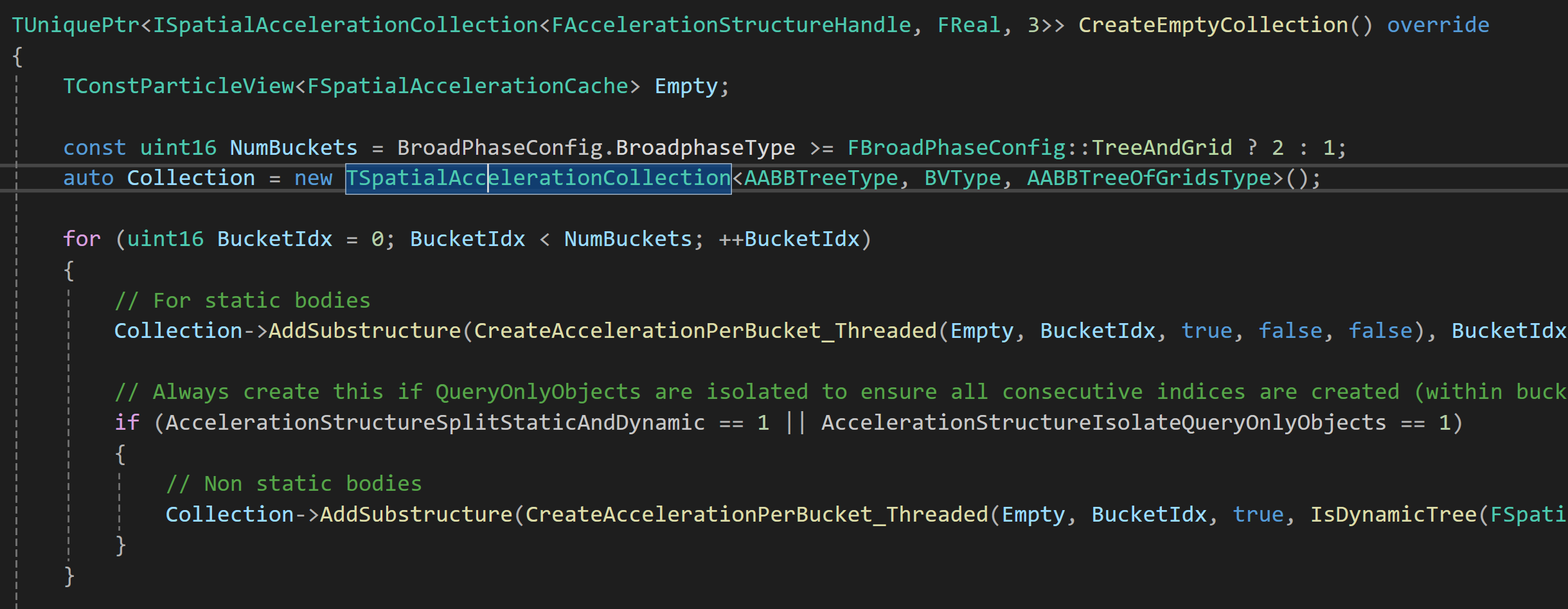
定位到更新树的过程:其实并不是重建,它是有rebuild的过程的,在UpdateElement函数中,对于每个刚体,先去表中查找它所在的叶子节点,一般一个叶子节点包含至多8个刚体,假设该刚体新的aabb被包含在了这个叶子节点原来的aabb里面,那么就没有必要去更新树,只需要更新叶子节点的aabb包围盒,因为它有可能缩小。当然,如果你想更新被这个叶子节点影响的祖宗节点也是可以的,但是没有必要。 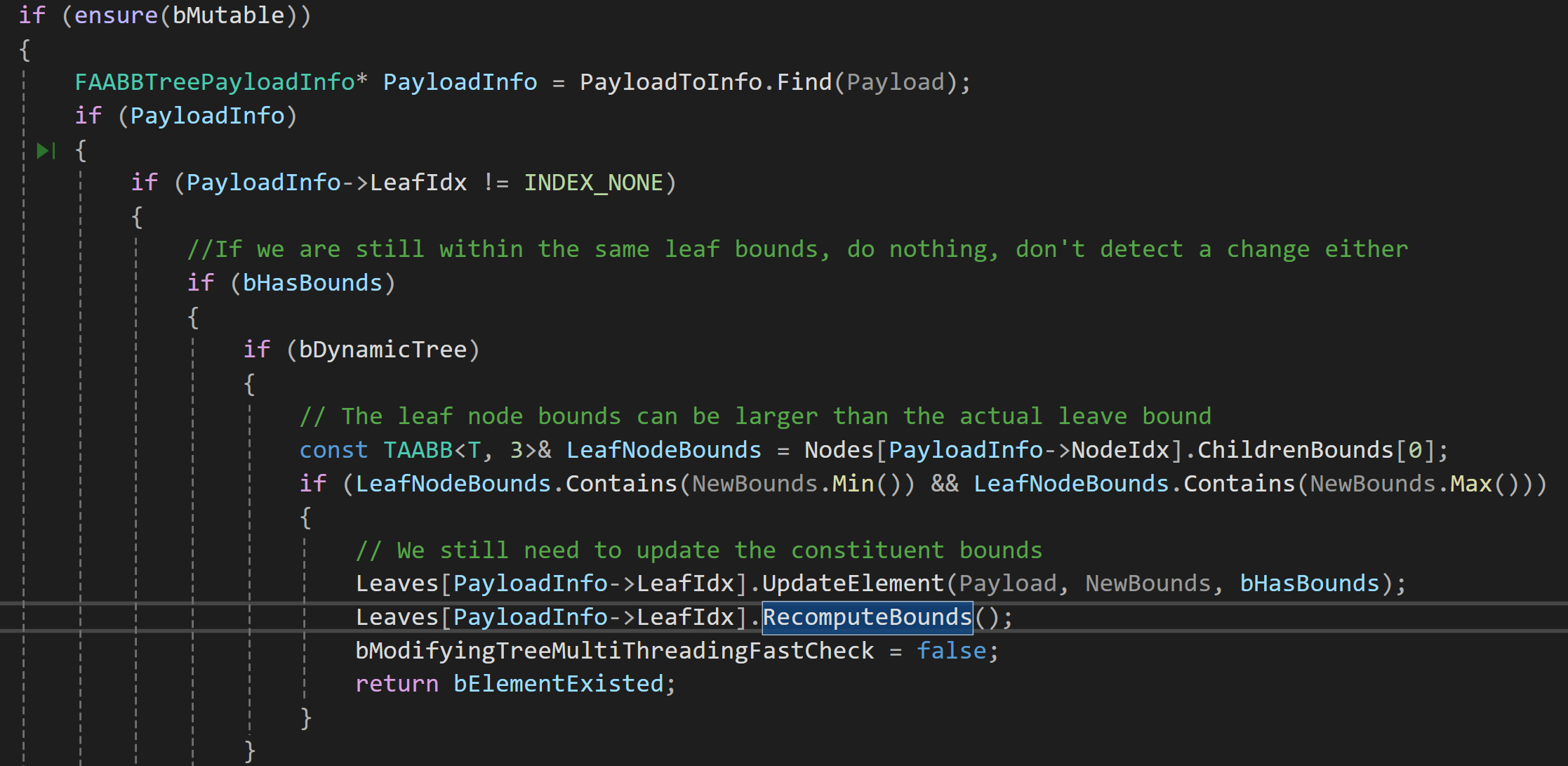 如果这个刚体运动的很不合群,以至于它无法被原来的叶子节点囊括进来,甚至它可能运动的非常剧烈,把它放在原来的叶子节点里面会导致该叶子的aabb变的非常大,导致bvh遍历的效率大大降低。那么就要把这个刚体从树里面去除了,然后再把它当成一个新的刚体插入到树里面。
如果这个刚体运动的很不合群,以至于它无法被原来的叶子节点囊括进来,甚至它可能运动的非常剧烈,把它放在原来的叶子节点里面会导致该叶子的aabb变的非常大,导致bvh遍历的效率大大降低。那么就要把这个刚体从树里面去除了,然后再把它当成一个新的刚体插入到树里面。 
坏了,这个方法感觉非常的合理呀,是不是没我什么事情了。。。看看physX是怎么做的吧。
 阿啸
阿啸